¿Cómo modelar un brazo robótico en AnyLogic?
Los brazos robóticos han sido un cambio revolucionario en múltiples industrias, donde cada año el uso de estos, en conjunto con algoritmos de operación automática e inteligencia artificial, ganan más fuerza. Su productividad, seguridad y baja tasa de fallos los convierten en una alternativa interesante.
En la industria manufacturera moderna, los brazos robóticos se han convertido en herramientas esenciales en una variedad de sectores. La industria automotriz, una de las primeras en adoptar esta tecnología, los utiliza para tareas como ensamblaje, soldadura y pintura. En el sector electrónico, estos robots facilitan el ensamblaje de componentes diminutos con precisión. Los procesadores de alimentos y bebidas integran robots para empaque y manipulación, mientras que el sector médico los utiliza en cirugías precisas. En metalurgia, son responsables de manipular piezas pesadas y calientes. Aunque la industria textil ha sido tradicionalmente manual, está adoptando brazos robóticos para tareas como el corte de tela.
Hay algunas formas fáciles de hacerlo
¿Qué pasa si queremos hacer un modelo de simulación que use un brazo robótico en AnyLogic? Se puede hacer de muchas maneras, dependerá del nivel de precisión que requerimos.
Actualmente AnyLogic no ofrece ningún objeto en sus bibliotecas que represente un brazo robótico, sin embargo, podemos usar ciertos “trucos” para modelar procesos que lo requieran. Por ejemplo:
-
Si en una estación de trabajo hay un objeto que debe ser soldado por un brazo robótico, podemos simplemente simular el brazo robótico de manera ficticia, creando un resource pool y especificando un tiempo de Delay para ese proceso.
-
Si una pieza debe ser transportada por un brazo robótico del punto A al punto B, también podemos hacerlo de manera ficticia, simplemente teletransportando o moviendo el objeto, y usando un resource pool para simbolizar este brazo/recurso.
-
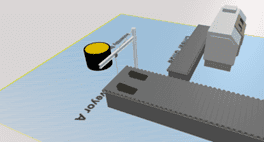
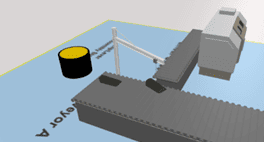
Para transportar una pieza, es posible usar el objeto Jib Crane de la biblioteca de manejo de materiales, de esta manera podríamos representar el movimiento de un objeto de un punto a otro, sin embargo, es un enfoque que está lejos de la realidad.
Aunque se puede “modelar”, todos los puntos anteriores tienen un problema, y es que en modelos moderadamente complejos o donde se requiere cierto grado de precisión, estos enfoques de soluciones pueden estar lejos de la realidad.
Hay formas avanzadas de hacerlo
¿Qué es lo más cercano a un brazo robótico que se puede modelar en AnyLogic? Bueno, un brazo robótico con sus patrones de movimiento. Solo estará limitado por la imaginación y el conocimiento del modelador.
AnyLogic es un software de simulación muy flexible, así que siempre puedes crear nuevas soluciones u objetos para resolver problemas, y la creación de un brazo robótico no es la excepción.
Cada modelador tendrá sus preferencias y formas de resolver un problema, sin embargo, aquí discutiremos una forma de modelar un brazo robótico:
-
Primero podemos dividir un brazo en diferentes partes:
-
Necesitaremos un objeto 3D que pueda servir como un “brazo” para visualizar este robot durante la simulación.
-
Cada parte del robot puede ser un agente que vive dentro del otro, de modo que la pinza vive dentro del antebrazo, el antebrazo vive dentro del brazo superior, y así sucesivamente. De esta manera, cuando rotas o mueves una parte del robot, el resto se moverá junto.
-
Inevitablemente usaremos trigonometría para calcular los ángulos de cada articulación del brazo, con el objetivo de alcanzar el objeto que quiere ser transportado o procesado. (por eso deberíamos haber prestado atención en la clase de cálculo/álgebra).
Brazo Robótico vs Grúa de Manejo de Materiales
Algunas diferencias que podemos encontrar entre usar la grúa de la biblioteca de manejo de materiales y crear un robot por nuestra cuenta son las siguientes:
-
La grúa tiene tres movimientos. La rotación, el movimiento de arriba y abajo del objeto y la velocidad del carro, que es un movimiento horizontal. El robot no tiene movimientos de sus partes, solo rotaciones alrededor de un eje. Tiene rotación basal (que es la misma que la de la grúa), una rotación del hombro, una rotación del codo y una rotación de la muñeca.
-
Como resultado de la diferencia anterior, parece que podemos configurar velocidades de rotación para cada uno de los ejes mencionados, por lo que, en lugar de definir velocidades en m/s como con la grúa, podemos definir velocidades de rotación en grados/s. De esta manera, podemos representar mejor cómo funcionan los robots en la realidad.
-
Otra diferencia importante es la estética. Generalmente es interesante para las partes interesadas que la simulación represente la realidad tal como es.
Para el modelador puede ser un punto clave verificar que la simulación realmente está haciendo lo que debería hacer, en los tiempos correctos y con la mecánica correcta. Para el usuario final de la simulación, ver que una grúa está haciendo lo que debería hacer un robot puede significar rechazo o incluso un factor para no validar la simulación.
Pero ya tenemos el robot para ti, consulta nuestro brazo robótico gratuito aquí: /es/blog/robotic-arm-library/