Operaciones Mineras Inteligentes -- Robótica de Enjambre Impulsada por IA

Desafío
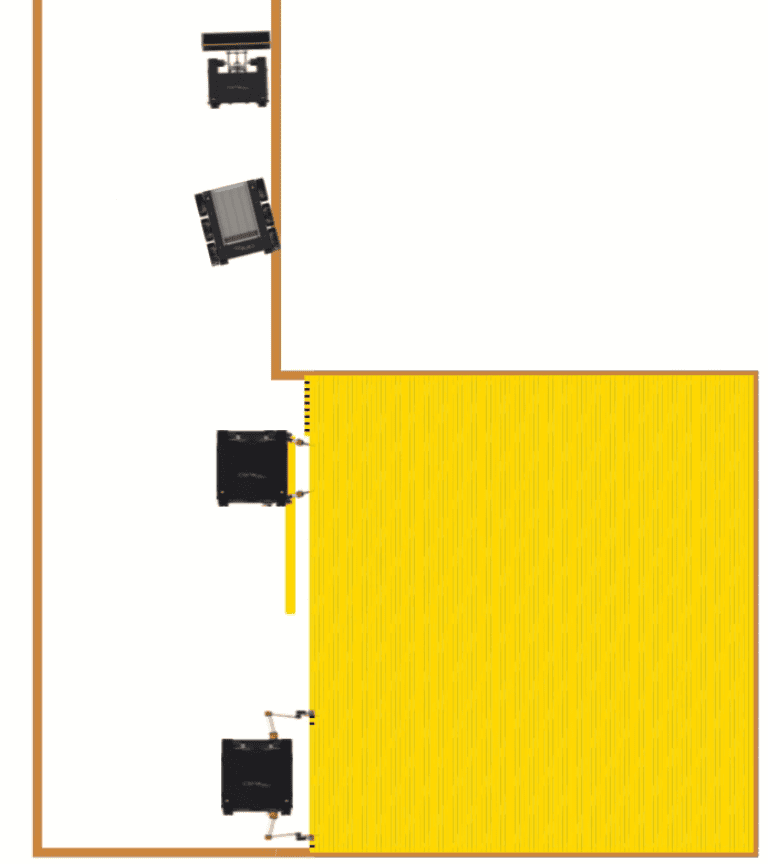
Este proyecto representó operaciones mineras realizadas por sistemas robóticos de enjambre impulsados por IA con tres tipos de robots:
- Excavadores: Robots con dos brazos (configuraciones de cincel o sierra). Un excavador con cincel y sierra puede operar independientemente; otras configuraciones requieren trabajo en equipo.
- Recolectores: Dos configuraciones — o llevan el mineral ellos mismos (actuando como recolectores y transportadores), o trabajan en equipo con un transportador separado.
- Topógrafos: Usados para propósitos de mapeo, con decisiones operacionales basadas en la distancia a otros robots y la frecuencia de escaneo.
El desafío fue estudiar el comportamiento operacional de estos robots para una distribución dada y entender cómo diferentes configuraciones impactan las métricas de rendimiento. La configuración del diseño de la mina también juega un papel importante en la estrategia de coordinación.
Además, se usa equipo convencional (cargadores y transportadores) para transportar material desde las reservas subterráneas hasta un circuito de procesamiento.
Solución
Se construyó un modelo en AnyLogic usando la biblioteca de manejo de materiales, la biblioteca de fluidos y casi 30 agentes diferentes para la arquitectura completa del modelo.
Generación Automática de Distribución
Una de las características más importantes fue construir la distribución de la mina automáticamente, ya que la estrategia de enjambre cambiaría dependiendo de la configuración de cámaras, corredores y espacio de movimiento. La distribución fue construida completamente en un archivo Excel que AnyLogic lee para construir la configuración de la mina antes del inicio de la simulación.
Sistema Experto para Coordinación de Robots
Como este fue el primer paso hacia un comportamiento de enjambre más inteligente con IA, se construyó un sistema experto con reglas de comportamiento para la estrategia de trabajo en equipo. Esto fue integrado con la evitación de obstáculos de la biblioteca de manejo de materiales de AnyLogic, logrando resultados de rendimiento similares a lo que se esperaría con IA.

Resultados
La simulación fue usada para entender el rendimiento de diferentes combinaciones de robots para diferentes distribuciones, lo cual fue muy relevante ya que los resultados operacionales eran desconocidos e incognoscibles sin simulación. Como algunos robots ni siquiera existían aún, también se usó para determinar qué robots construir primero, ya que algunas combinaciones demostraron funcionar mejor con ciertos tipos de robots.
Características del Proyecto
- Industria: Minería, Robótica
- Modelo: Eventos Discretos
- Duración: 1 mes
¿Necesitas una simulación similar para tu proyecto?
Agenda una Consulta