كيفية نمذجة ذراع روبوتي في AnyLogic؟
كانت الأذرع الروبوتية عاملاً محورياً في العديد من الصناعات، حيث يزداد استخدامها كل عام، بالتزامن مع خوارزميات التشغيل الآلي والذكاء الاصطناعي. إنتاجيتها وسلامتها ومعدل فشلها المنخفض يجعلانها بديلاً مثيراً للاهتمام.
في صناعة التصنيع الحديثة، أصبحت الأذرع الروبوتية أدوات أساسية في مجموعة متنوعة من القطاعات. صناعة السيارات، إحدى أولى الصناعات التي اعتمدت هذه التكنولوجيا، تستخدمها في مهام مثل التجميع واللحام والطلاء. في قطاع الإلكترونيات، تسهل هذه الروبوتات تجميع المكونات الصغيرة بدقة. يدمج معالجو الأغذية والمشروبات الروبوتات للتعبئة والمناولة، بينما يستخدمها القطاع الطبي في العمليات الجراحية الدقيقة. في علم المعادن، هي مسؤولة عن التعامل مع الأجزاء الثقيلة والساخنة. على الرغم من أن صناعة النسيج كانت تقليدياً يدوية، إلا أنها تعتمد الأذرع الروبوتية لمهام مثل قص القماش.
هناك بعض الطرق السهلة للقيام بذلك
ماذا لو أردنا عمل نموذج محاكاة يستخدم ذراعاً روبوتياً في AnyLogic؟ يمكن القيام بذلك بعدة طرق، وسيعتمد على مستوى الدقة الذي نحتاجه.
حالياً لا يقدم AnyLogic أي كائن في مكتباته يمثل ذراعاً روبوتياً، لكن يمكننا استخدام “حيل” معينة لنمذجة العمليات التي تتطلبه. على سبيل المثال:
-
إذا كان هناك كائن على محطة عمل يجب لحامه بواسطة ذراع روبوتي، يمكننا ببساطة محاكاة الذراع الروبوتي بطريقة وهمية، بإنشاء مجمع موارد وتحديد وقت تأخير لتلك العملية.
-
إذا كان يجب نقل قطعة بواسطة ذراع روبوتي من النقطة أ إلى النقطة ب، يمكننا أيضاً القيام بذلك بشكل وهمي، ببساطة عن طريق نقل الكائن تلقائياً أو تحريكه، واستخدام مجمع موارد لترمز لهذا الذراع/المورد.
-
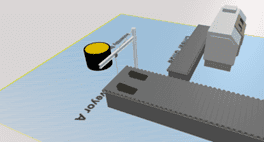
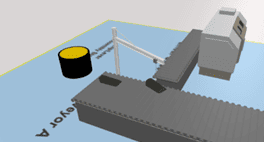
لنقل قطعة، من الممكن استخدام كائن Jib Crane من مكتبة مناولة المواد، بهذه الطريقة يمكننا تمثيل حركة كائن من نقطة إلى أخرى، لكنه نهج بعيد عن الواقع.
على الرغم من أنه يمكن “نمذجتها”، فإن جميع النقاط السابقة بها مشكلة، وهي أنه في النماذج المعقدة نسبياً أو حيث يُطلب درجة معينة من الدقة، قد تكون هذه الأساليب الحلولية بعيدة عن الواقع.
هناك طرق متقدمة للقيام بذلك
ما هو أقرب شيء لذراع روبوتي يمكن نمذجته في AnyLogic؟ حسناً، ذراع روبوتي مع أنماط حركته. سيكون محدوداً فقط بخيال ومعرفة المصمم.
AnyLogic هو برنامج محاكاة مرن جداً، لذا يمكنك دائماً إنشاء حلول أو كائنات جديدة لحل المشاكل، وإنشاء ذراع روبوتي ليس استثناءً.
لكل مصمم تفضيلاته وطرقه في حل المشكلة، لكن هنا سنناقش طريقة لنمذجة ذراع روبوتي:
-
يمكننا أولاً تقسيم الذراع إلى أجزاء مختلفة:
-
سنحتاج إلى كائن ثلاثي الأبعاد يمكن أن يعمل كـ “ذراع” لتصور هذا الروبوت أثناء المحاكاة.
-
كل جزء من الروبوت يمكن أن يكون وكيلاً يعيش داخل الآخر، بحيث يعيش القابض داخل الساعد، والساعد يعيش داخل العضد، وهكذا. بهذه الطريقة، عندما تقوم بتدوير أو تحريك جزء واحد من الروبوت، سيتحرك الباقي معه.
-
سنستخدم حتماً علم المثلثات لحساب زوايا كل مفصل في الذراع، بهدف الوصول إلى الكائن المراد نقله أو معالجته. (لهذا السبب كان يجب أن ننتبه في حصة التفاضل والتكامل/الجبر).
الذراع الروبوتي مقابل رافعة مكتبة مناولة المواد
بعض الفروقات التي يمكن أن نجدها بين استخدام رافعة مكتبة مناولة المواد وإنشاء روبوت بأنفسنا هي التالية:
-
الرافعة لديها ثلاث حركات. الدوران وحركة الكائن لأعلى ولأسفل وسرعة العربة، وهي حركة أفقية. الروبوت ليس لديه حركات لأجزائه، فقط دورانات حول محور. لديه دوران قاعدي (وهو نفس دوران الرافعة)، ودوران الكتف، ودوران المرفق، ودوران المعصم.
-
نتيجة للفرق السابق، يبدو أنه يمكننا تكوين سرعات دوران لكل من المحاور المذكورة أعلاه، لذا بدلاً من تحديد السرعات بالمتر/الثانية كما هو الحال مع الرافعة، يمكننا تحديد سرعات الدوران بالدرجات/الثانية. بهذه الطريقة، يمكننا تمثيل كيفية عمل الروبوتات في الواقع بشكل أفضل.
-
فرق مهم آخر هو الجماليات. عادة ما يكون مثيراً للاهتمام لأصحاب المصلحة أن تمثل المحاكاة الواقع كما هو فعلاً.
بالنسبة للمصمم يمكن أن تكون نقطة أساسية للتحقق من أن المحاكاة تفعل فعلاً ما يجب أن تفعله، في الأوقات الصحيحة وبالآليات الصحيحة. بالنسبة للمستخدم النهائي للمحاكاة، رؤية رافعة تقوم بما يجب أن يقوم به روبوت يمكن أن يعني الرفض أو حتى عاملاً في عدم التحقق من صحة المحاكاة.
لكن لدينا الروبوت جاهز لك بالفعل، تحقق من ذراعنا الروبوتي المجاني هنا: /ar/blog/robotic-arm-library/