

- Client :Abdulaziz A.
- Category :Agent-Based, Discrete Events
- Project Url :N/A
- Date :November 20, 2018
Platoon
Challenge
This client wanted to prove the hypothesis that using an automated high quality car as the leader of a platoon of other automated cars in a highway is better in terms of safety and speed compared to using a manual truck or bus driven by a human as the leader.
Solution
In AnyLogic, the Road Traffic Library is generally used to model vehicles in a road, but it is not possible to use platoons in them since we have no control over the AI of the cars, so we had to go back to the good and old Process Modeling Library / Agent-Based hybrid to create this. A 2 miles road was created with several obstacles in between (rain, holes, accidents, hazards and moving entities crossing the road), and according to the characteristics of the leader (sensors, sonars, passengers, etc) the platoon would resolve the obstacles in different ways by reducing the speed, detecting the obstacle from a long distance or making a full stop.
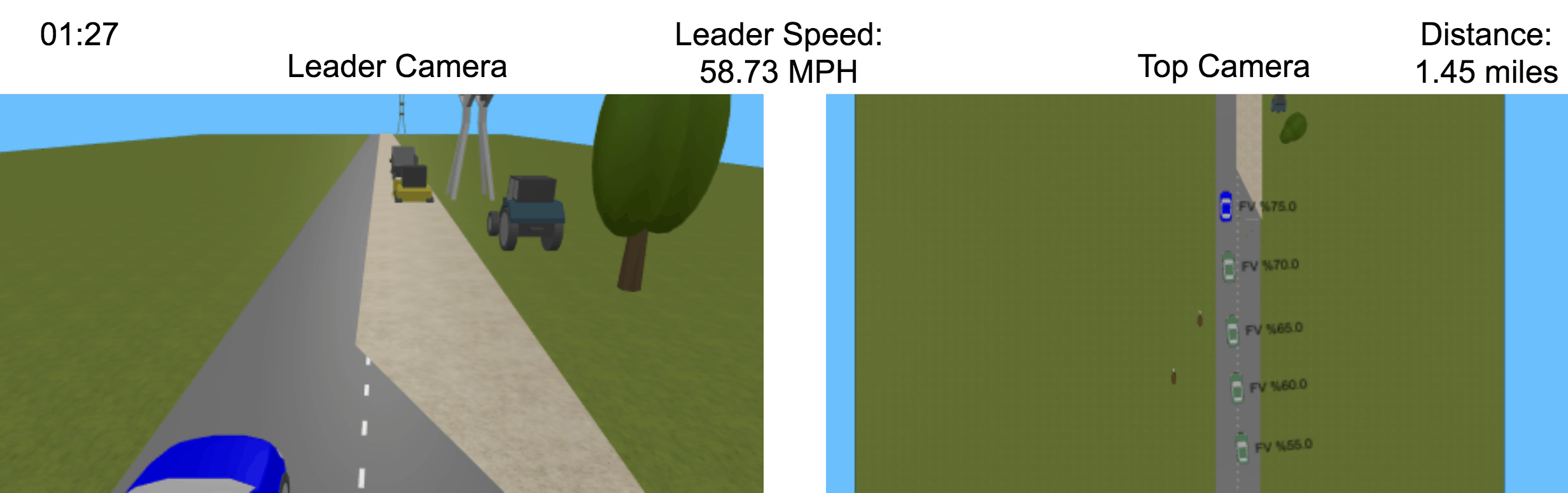
Figure 1 – Top and front cameras of the platoon
Outcome
The conclusion of the model was that the automated car was better in terms of safety (faster stop, better understanding of the road obstacles) and speed (completed the 2 miles faster) than the bus or truck driven by a human, confirming the hypothesis of the client
Project Features
- Industry: Traffic, Platoon
- Model: Discrete Events, Agent-Based
- Duration: 1 week